


Find more 2007 images & videos here (German language)
|
| KISS (Keep It Simple, Stupid) | |
algorithms

|
hardware principals

|
| I used for robotics | |
|
https://github.com/Hermann-SW/4DoF_robot_arm (video) |
Wireless control Eachine E52 FPV drone (via TCP replay [attack]) 
|
|
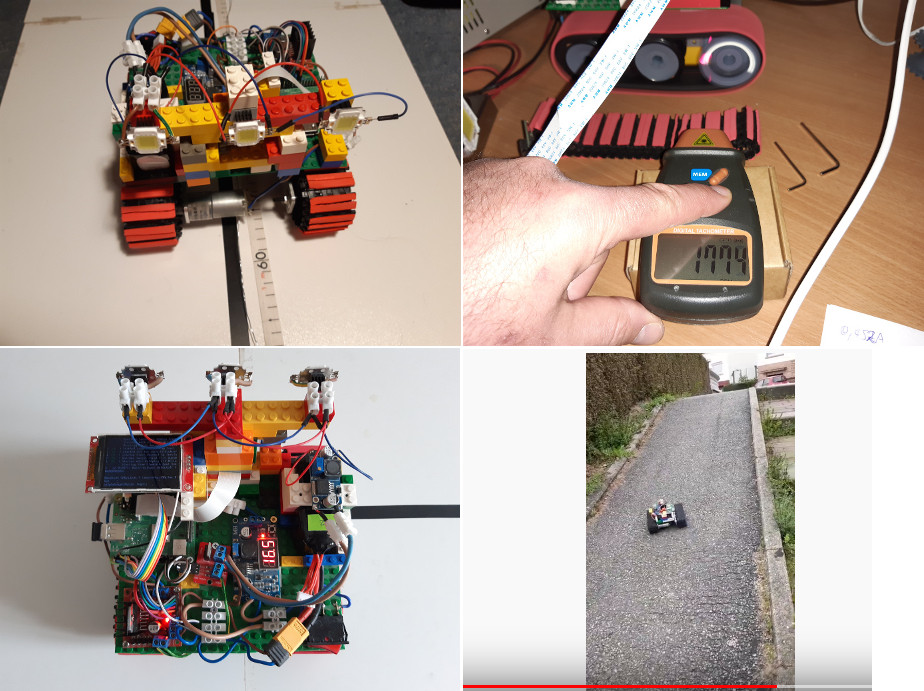
raspcatbot (Raspberry caterpillar robot) forum thread: https://www.raspberrypi.org/forums/viewtopic.php?f=37&t=267999
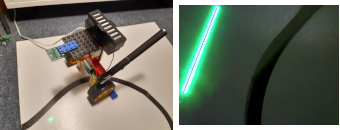
Slowmo of raspcatbot passing, 100× slower than real, only 1.14m/s here:
Bring your own light and monochrome global shutter camera / free running 1774rpm(!), 6.04m/s with 65mm wheel
front view video from 22.5km/h toy train …
1kg raspcatbot running (with steel wire rope) on 1.25m radius around screw in garage floor. |
|
2 0 1 5 |
|||||
| 73g "robot" |    |
||||
96g Arduino uno robot
|    |
||||
High speed Arduino uno robot
|    |
||||
|
2 0 1 7 |
Loosing big outrunner motor wheel with bullet at 60km/h can be dangerous for top mounted camera ;-) https://forum.arduino.cc/t/motor-test-station-mts/319852/42 
|
||||
Arduecat (Arduino Due Caterpillar robot)
|
   |
||||
| full stop back wheelies | 

  |
||||
| • U-turn w/o speed (>2m/s) reduction • just swap one motor's direction for some time • slowed down by factor 90/25=3.6 • 90fps slowmo youtube video • positions at start of (overshooted) U-turn, at 90°, 180° and finally before going straight again • Arduebot can do similar U-turn |


 |
||||
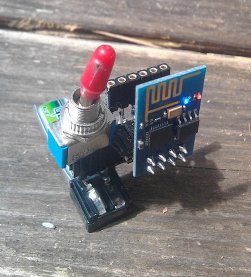
Standalone small outdoor #Wifi #access #point and #webserver based on #ESP8266-01 with #LiPo! [1] [2] |
 6g in total version |
 Wireless ESP01S Payload drop mechanism addon for drone (14.4× slower than real) |



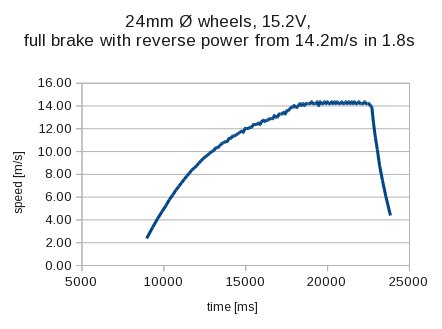
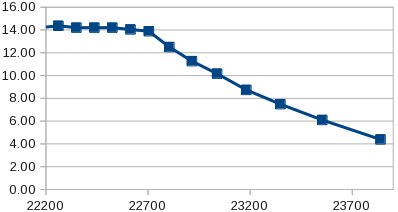
 , after 1800ms braking delay only 1 (power) LED left on, details in
, after 1800ms braking delay only 1 (power) LED left on, details in